Cinematica del punto materiale
- Punto materiale
- Velocità e accelerazione
- Moto rettilineo uniforme
- Moto naturalmente accelerato
- Moto parabolico
- Moto armonico
- Moto circolare
Antonio Pierro @antonio_pierro_
Per consigli, suggerimenti, eventuali errori o altro potete scrivere una email a antonio.pierro[at]gmail.com
Punto materiale
- In Fisica, si definisce punto materiale un corpo privo di dimensioni, o le cui dimensioni sono trascurabili rispetto a quelle della regione di spazio in cui può muoversi e degli altri oggetti con cui può interagire.
- Esempio: se si vuole studiare il moto della Luna rispetto alla Terra, sia la Luna che la Terra possono essere approssimate a punti materiali, dato che le loro dimensioni sono molto più piccole rispetto alla loro distanza.
Moti rettilinei.
- La traiettoria è il luogo dei punti via via occupati dal punto materiale
- Nel moto rettilineo la traiettoria è una retta.
- Esempi di moti rettilinei:
- Il moto di caduta di un corpo abbandonato con velocità nulla da una certa altezza
- Il moto oscillatorio di un grave appeso ad un soffitto mediante una molla.
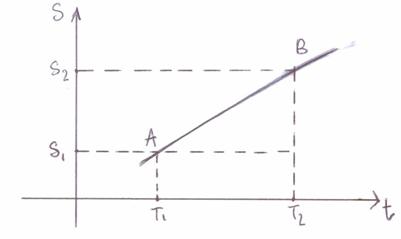
Legge oraria
- La posizione del punto materiale che si muove sulla traiettoria rettilinea in funzione del tempo potrà essere rappresentata:
- mediante una espressione analitica \[ x = x(t) \ legge \ oraria\ del\ moto \]
- rappresentaione grafica (grafico orario):
Velocità 1/2
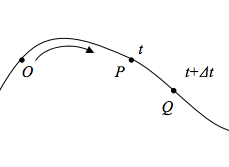
- Consideriamo un punto mobile P sopra una qualsiasi linea.
- Se P si muove sulla curva al variare del tempo t, allora \(\vec{s}\) sarà funzione di t e si scriverà: \( \quad\quad \vec{s} = \vec{s}(t)\)
- Se dopo un intervallo di tempo Δt, cioè all'istante t + Δt, il punto mobile si troverà in Q, lo spazio percorso a quell'istante sarà: \[\vec{s}(t + Δt) \]
- Osserviamo dunque che all'incremento Δt della variabile tempo corrisponde, per lo spazio, l'incremento: \[ \Delta \vec{s} = \vec{s}(t + \Delta t) - \vec{s}(t) \] che rappresenta lo spazio percorso da P nel tempo \(\Delta t\)
Velocità 2/2
- Si definisce velocità media del punto mobile: \[ \frac {\Delta \vec{s}}{\Delta t} = \frac{\vec{s}(t + \Delta t) - \vec{s}(t)}{\Delta t} \]
Facciamo tendere a zero l'incremento Δt del tempo:\[ \lim_{\Delta t \to 0} \frac{\vec{s}(t + \Delta t) - \vec{s}(t)}{\Delta t} \]Si definisce velocità istantanea la derivata dello spazio rispetto al tempo:\[ \vec{v} = \lim_{\Delta t \to 0} \frac{\Delta \vec{s}} {\Delta t} = \frac{d\vec{s}}{dt} = \vec{s}^{'} \]
Accelerazione 1/2
- La velocità istantanea è una funzione del tempo t e quindi nell'intervallo \(\Delta t\) di tempo subirà la variazione: \[ \Delta \vec{v} = \vec{v}(v + \Delta t) - \vec{v}(t) \]
- Si definisce accelerazione media del punto materiale: \[ \frac {\Delta \vec{v}}{\Delta t} = \frac{\vec{v}(t + \Delta t) - \vec{v}(t)}{\Delta t} \]
Si definisce accelerazione istantanea la derivata della velocità rispetto al tempo:\[ \vec{a} = \lim_{\Delta t \to 0} \frac{\Delta \vec{v}} {\Delta t} = \frac{d\vec{v}}{dt} = \vec{v}^{'} \]
Accelerazione 2/2
-
L'accelerazione istantanea è la derivata della velocità rispetto al tempo e quindi è la derivata seconda dello spazio percorso rispetto al tempo.
\[
\vec{a}(t) = \frac{d \vec{v}(t)}{dt} = \frac{d}{dt} \frac{d \vec{s}}{dt} = \frac{d^2 \vec{s}(t)}{dt^2} = \vec{s}^{''}(t)
\]
Moto rettilineo uniforme 1/3
- Un corpo si muove di moto rettilineo e uniforme se mantiene una velocità costante in modulo, direzione e verso.
- Legge oraria del moto rettilineo e uniforme: \[ \vec{s} = \vec{s_0} + \vec{v} * t \]
Moto rettilineo uniforme 2/3
Moto rettilineo uniforme 3/3
Dimostrazione della legge oraria:\[ \vec{v} = \frac{d\vec{s}}{dt} \Rightarrow d\vec{s} = \vec{v} dt \Rightarrow \int_{s_0}^s d\vec{s} = \int_{t_0}^t \vec{v} dt \] \[ t_0 = 0 \Rightarrow \vec{s} - \vec{s_0} = \vec{v} * t \Rightarrow \vec{s} = \vec{s_0} + \vec{v} * t \]
Moto rettilineo uniformemente accelerato 1/3
- Un corpo si muove di moto rettilineo uniformemente accelerato se mantiene una accelerazione costante in modulo, direzione e verso.
- Legge oraria del moto rettilineo uniformemente accelerato: \[ \vec{s} = \vec{s_0} + \vec{v_0} t + \frac{1}{2}\vec{a} t^2 \]
- Velocità del moto uniformemente accelerato: \(\vec{v} = \vec{v_0} + \vec{a} \thinspace t\)
Moto rettilineo uniformemente accelerato 2/3
Moto rettilineo uniformemente accelerato 3/3
Dimostrazione della legge oraria del moto rettilineo uniformemente accelerato:\[ \vec{a} = \frac{d\vec{v}}{dt} \Rightarrow d\vec{v} = \vec{a} \thinspace dt \Rightarrow \int_{v_0}^v d\vec{v} = \int_{0}^t \vec{a} \thinspace dt \Rightarrow \vec{v} = \vec{v_0} + \vec{a} \thinspace t \] \[ \frac{d\vec{s}}{dt} = \vec{v_0} + \vec{a} \thinspace t \Rightarrow d\vec{s} = \vec{v_0} dt + \vec{a} \thinspace t dt \Rightarrow \] \[ \int_{s_0}^{s} \vec{s} \thinspace ds = \int_0^{t} \vec{v_0} dt + \int_{0}^{t} \vec{a} \thinspace t dt \Rightarrow \vec{s} = \vec{s_0} + \vec{v_0} t + \frac{1}{2}\vec{a} t^2 \]
Moto parabolico
- Il moto parabolico è un tipo di moto bidimensionale esprimibile attraverso la combinazione di due moti rettilinei simultanei e indipendenti:
- moto rettilineo uniforme
- moto uniformemente accelerato.
- Si dimostra che la traiettoria del moto parabolico rappresenta una parabola.
Traiettoria del moto parabolico
- Si supponga che un corpo sia lanciato con velocità iniziale \(v_0\) e con un angolo \(\theta\) rispetto all'asse x orizzontale.
- Il vettore velocità può essere scomposto lungo le due componenti x e y: \[ \vec{v_0} = v_0 cos(\theta) \vec{i} + v_0 sen(\theta) \vec{j} \]
- Le leggi orarie dei moti lungo gli assi x e y sono: \[ x(t) = v_0 cos(\theta) * t, \quad y(t) = v_0 sin(\theta) * t - \frac{1}{2} * g * t^2 \]
- Esplicitando il parametro t dalla legge oraria x(t) e sostituendo in y(t) si ottiene una parabola con concavità rivolta verso il basso: \[ y = x * tang\theta - \frac{g}{2v_0^2cos^2(\theta)} * x^2 \]
Animazione del moto parabolico
Moto circolare
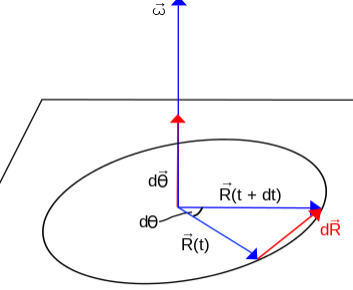
- Il moto circolare è il moto di un punto materiale lungo una circonferenza.
- Lo spostamento lineare del punto sulla circonferenza \(\Delta{R}\) sarà legato allo spostamento angolare \(\Delta{\theta}\): \[ \Delta{R} = \Delta{\theta} \times {R} \]
- La velocità angolare media è definita come: \[ \omega = \frac{\Delta{\theta}}{\Delta{t}} [\frac{rad}{s}] \Rightarrow \vec{v}(t) = \frac{\Delta{R}}{\Delta{t}} = \omega \times R \]
Moto circolare uniforme
- Un corpo si muove di moto circolare uniforme se mantiene una velocità angolare costante in modulo, direzione e verso.
- Legge oraria del moto circolare uniforme: \[ \theta = \theta_0 + \omega * t \]
Dimostrazione della legge oraria:\[ \vec{\omega} = \frac{d\vec{\theta}}{dt} = costante \Rightarrow d\vec{\theta} = \vec{\omega} * dt \] \[ \int_{\theta_0}^{\theta} d\vec{\theta} = \int_{o}^t \vec{\omega} * dt \Rightarrow \theta = \theta_0 + \omega * t \]
Moto armonico - funzione periodica
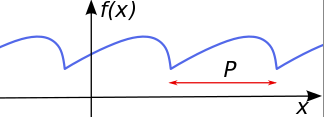
- In Matematica una funzione si dice periodica se assume valori che si ripetono esattamente a intervalli regolari.
- Le funzioni trigonometriche seno e coseno sono periodiche di periodo 2\(\pi\).
Moto Armonico 1/2
- Si definisce moto armonico il moto di un punto materiale la cui legge oraria è una funzione periodica del tipo: \[ x(t) = A sen(\omega t + \phi_0) \] dove A è l'ampiezza dell'oscillazione, \(\phi_0\) è la fase iniziale e \(\omega\) è la pulsazione
- Per un moto armonico così definito si dimostra che il periodo è: \[ T = \frac{2\pi}{\omega} \]
Moto Armonico 2/2
La velocità e l'accelerazione sono rispettivamente la derivata prima e seconda della legge oraria, ovvero:\[ v(t) = \frac{d x(t)}{dt} = \omega A cos (\omega t + \phi); \] \[ d(t) = \frac{d v(t)}{dt} = -\omega^2 A sin (\omega t + \phi); \]